Elderly Assistant Robot
Description
This is the senior project completed by nine students from Shanghai University, including me, and four students from Worcester Polytechnic Institute. The goal of this project is to make a prototype robot that is capable of performing basic operation of autonomous navigation and arm operation as an elderly and disabled life-assist robot. As a team member, I was in the simulation group, mainly responsible for the path planning and kinematics simulation of robot chassis and manipulator.
Navigation
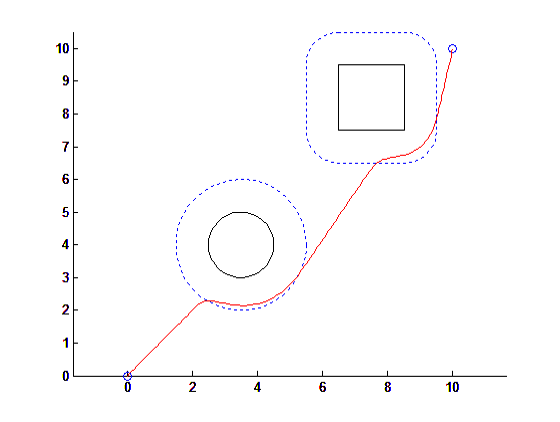
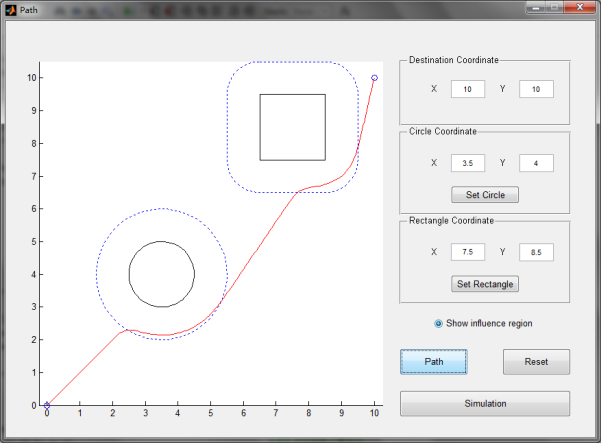
The program for robot navigation was developed in MATLAB and the main idea was the use of the artificial potential field method. The method consisted of force vectors, created by the obstacles and the target, which had repulsive and attractive characteristics, respectively. With the resultant of forces affecting the robot, the next point of the path could be defined, and the whole path would be generated by repeating the same procedure. Considering the oscillations region, we might force the robot to move a random step to escape when it was in the trap. To facilitate simulating different situations, a GUI is developed in MATLAB which could plot the final path simply by inputting different parameters.
This is the senior project completed by nine students from Shanghai University, including me, and four students from Worcester Polytechnic Institute. The goal of this project is to make a prototype robot that is capable of performing basic operation of autonomous navigation and arm operation as an elderly and disabled life-assist robot. As a team member, I was in the simulation group, mainly responsible for the path planning and kinematics simulation of robot chassis and manipulator.
Navigation
The program for robot navigation was developed in MATLAB and the main idea was the use of the artificial potential field method. The method consisted of force vectors, created by the obstacles and the target, which had repulsive and attractive characteristics, respectively. With the resultant of forces affecting the robot, the next point of the path could be defined, and the whole path would be generated by repeating the same procedure. Considering the oscillations region, we might force the robot to move a random step to escape when it was in the trap. To facilitate simulating different situations, a GUI is developed in MATLAB which could plot the final path simply by inputting different parameters.
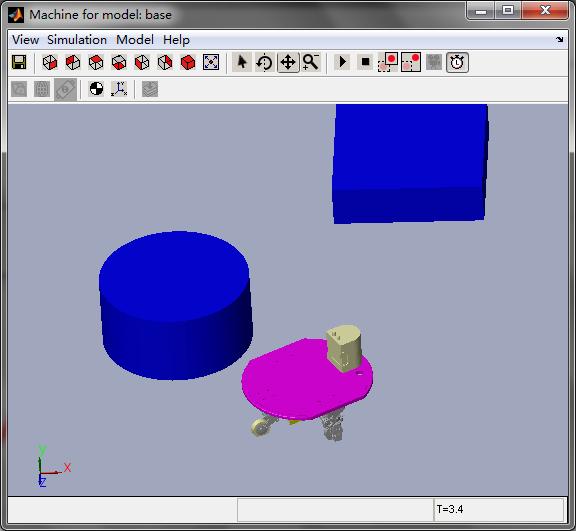
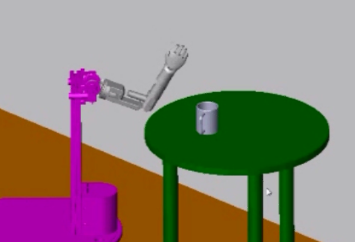
Simulation
The model of the robot’s chassis was created in Soildworks, and finally imported into Simulink. In Simulink, each component was shown as a block. By adding the function blocks, the robot could be driven as desired.
The model of the robot’s chassis was created in Soildworks, and finally imported into Simulink. In Simulink, each component was shown as a block. By adding the function blocks, the robot could be driven as desired.