Robot Testbed Development
Quadcopter
Quadcopter/UAV (unmanned aerial vehicle) was an experimental platform established for implementing robot control algorithms. Our on-board program was modified based on the source codes of ArduPilot Project. Additional codes were added such that quadcopters can be controlled by the ground station in addition to the RC transmitter.
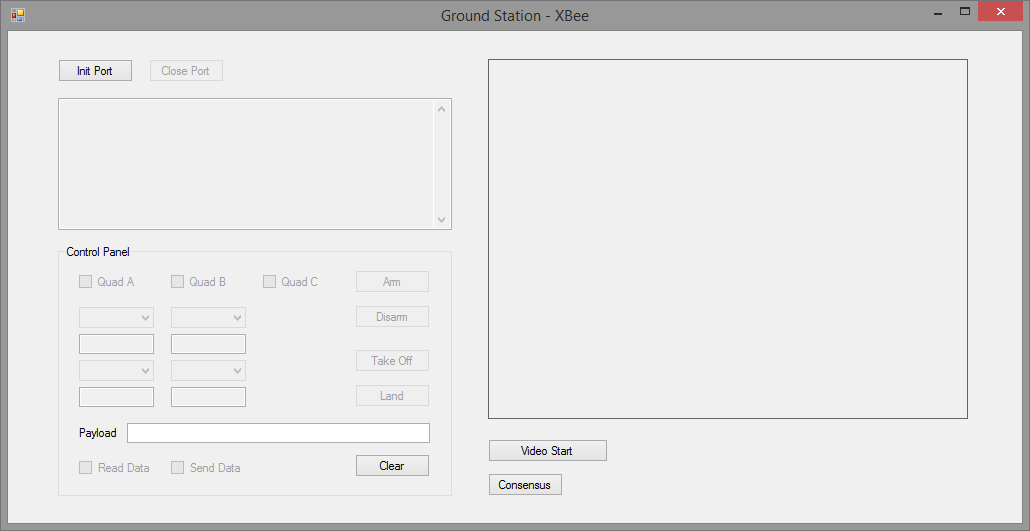
Quadcopter Ground Station
A ground station program was designed and developed in C# for the UAV testbed.
Quadcopter/UAV (unmanned aerial vehicle) was an experimental platform established for implementing robot control algorithms. Our on-board program was modified based on the source codes of ArduPilot Project. Additional codes were added such that quadcopters can be controlled by the ground station in addition to the RC transmitter.
Quadcopter Ground Station
A ground station program was designed and developed in C# for the UAV testbed.
- Established our own communication protocol, thereby, achieving the real-time data exchange between the computer and the aerial robots.
- Integrated Vicon SDK such that the ground station is able to collect real-time tracking data.
- Utilized multiple threads in the ground station to execute command transmission and data reception simultaneously.
- Combined safety subroutines such as altitude control, geo fence and auto land.

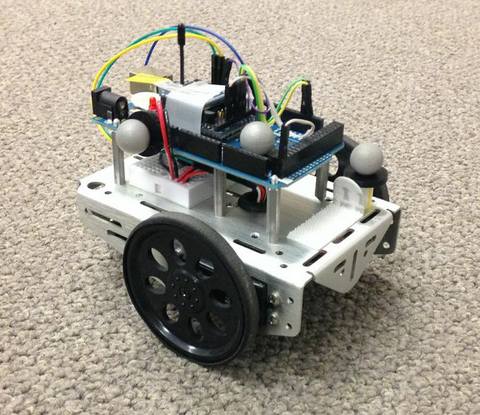
BoeBot
BoeBot was a differential drive ground robot built for research implementations. Each robot was equipped with an Arduino Mega 2560 board as the controller, and an XBee module as the communication unit. In my research, I added infrared proximity sensors as well as vision sensors to implement obstacle avoidance algorithms and visibility-based target tracking strategies, respectively.
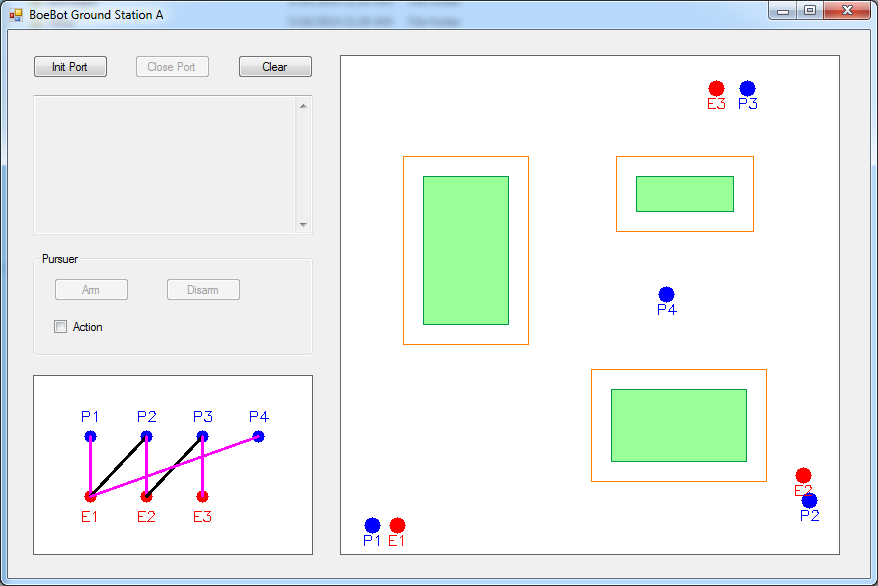
BoeBot Ground Station
To control multiple ground robots simultaneously, we developed a ground station using C# and EmguCV.
BoeBot was a differential drive ground robot built for research implementations. Each robot was equipped with an Arduino Mega 2560 board as the controller, and an XBee module as the communication unit. In my research, I added infrared proximity sensors as well as vision sensors to implement obstacle avoidance algorithms and visibility-based target tracking strategies, respectively.
BoeBot Ground Station
To control multiple ground robots simultaneously, we developed a ground station using C# and EmguCV.
- Integrated Vicon SDK for data collection.
- Executed multiple threads for command transmission and data collection.
- Attached dynamic graphs in the user interface to show the global environment and visibility connectivity.